

Дата публикации: 16.12.2022
Новая кожа
для персональных ощущений
в виртуальном мире.
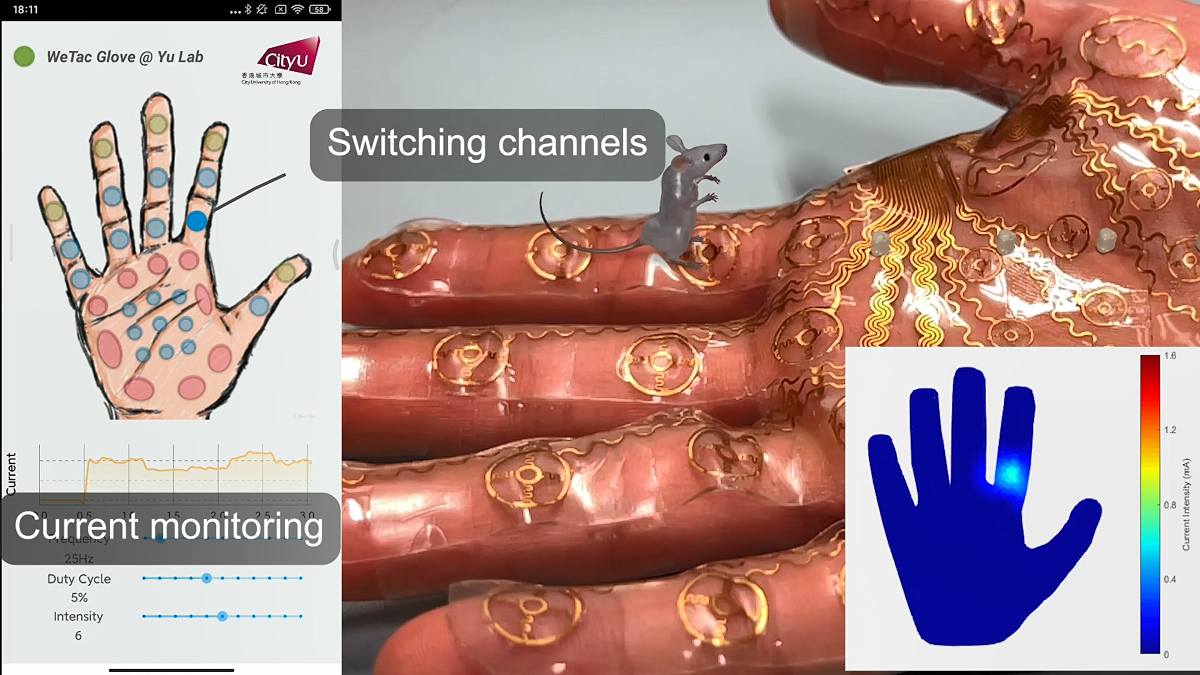
В сценарии дополненной реальности виртуальная мышь прыгает вперед и ненадолго останавливается на каждой точке руки. Накладка на руку с электродами на основе гидрогеля имеет 32 пикселя электротактильной стимуляции на стороне ладони, что позволяет легко отображать пороговые токи для разных пользователей. Источник.
Ценность виртуальной реальности сводится не только и не столько к развлечениям, ‒хотя, наверное, главенствующую мотивационную роль в прогрессе данного вида отображения информации нам следует признать именно за ними, ‒ сколько ко вполне практичным применениям в прикладных сферах вроде обучения или удалённого управления механизмами.Так, мировая практика ужеимеет опыт дистанционного проведения хирургической операции посредством управления специальным роботом. Однако в данном случае весь контроль за действиями устройства ограничивался лишь визуальным восприятием.
Поэтому улучшение виртуального опыта в виде осязания ‒ тактильных ощущений от прикосновения, изменения температуры, влажности и прочих параметров ‒ является весьма и весьма актуальной темой в исследовательских и инженерных кругах. Однако пока, в подавляющем большинстве случаев, такие устройства остаются громоздкими как сами по себе, так и обладают ещё более громоздкой коммутацией ‒ они буквально опутаны паутинами проводов, обеспечивающих выполнение задачи. Существующие тактильные перчатки базируются в основном на громоздких насосах и воздуховодах, питание и управление которыми осуществляется с помощью множества шнуров и кабелей, что серьёзно затрудняет иммерсивность (опыт присутствия или погружения) пользователей виртуальной и дополненной реальности (VR и AR соответственно).
И вот на днях, группа исследователей из Городского университета Гонконга (CityU)обнародовала свою разработку: WeTac, передовая система беспроводного тактильного интерфейса, попросту лишённая этих недостатков. Она предназначена для ношения на руке, однако мало общего имеет с привычными уже габаритными vr-перчатками: её основа выполнена из ультратонких мягких элементов, содержащих электроды, посредством которых проводится как сбор персонализированных данных о тактильных ощущениях, так и стимуляция нервных окончаний собственной кожи пользователя. Всё это обеспечивает яркий опыт работы в метавселенной с реалистичным осязаемым откликом псевдореальности.
Как уже говорилось, система имеет потенциал применения не только в играх (ну а куда же без них), но и в спортивных тренировках, в обучении новым сложным навыкам или восстановлении утерянных ‒ например, при медицинской реабилитации, ‒ социальной деятельности и, конечно, удалённом управлении роботами.
«Сенсорная обратная связь имеет большой потенциал (наряду с визуальной и звуковой информацией) в виртуальной реальности, поэтому мы продолжали пытаться сделать тактильный интерфейс тоньше, мягче, более компактным и беспроводным, чтобы его можно было свободно носить на руке, как вторую кожу», ‒ говорит руководитель исследования, доктор Ю Синге, доцент кафедры биомедицинской инженерии в CityU.
Система WeTac состоит из двух частей: миниатюрного мягкого драйвера, прикреплённого к предплечью в качестве пульта управления, и выполненной на основе гидрогеляи снабжённой электродом накладки на руку ‒ в качестве тактильного интерфейса.
Сам драйвер, обладает всего 19,2 г веса и размерами 5 на 5 см с толщиной 2,1 мм, закрепляется на руке, помещаясь чуть выше запястья. Он оснащён беспроводной связью Bluetooth с низким энергопотреблением (Bluetooth Low Energy или BLE) и небольшой перезаряжаемый литий-ионный аккумулятор. Что же до накладки на ладонь, то её толщина и того меньше: всего от 220 мкм до 1 мм. Благодаря этому она демонстрирует большую гибкость и гарантирует эффективную обратную связь в различных позах и жестах.
«Электротактильная стимуляция ‒ хороший метод обеспечения эффективного виртуального прикосновения для пользователей, ‒ поясняет доктор Ю. ‒ Однако, поскольку у людей разная чувствительность, одна и та же сила обратной связи может по-разному ощущаться в руках разных пользователей. Поэтому нам необходимо соответствующим образом настроить параметры обратной связи, чтобы предоставить универсальный инструмент для всех пользователей, чтобы устранить ещё одно серьёзное узкое место в текущей тактильной технологии».
Сверхмягкость WeTac позволяет легко отображать пороговые токи для отдельных пользователей и определить оптимизированные параметры для каждой части руки. Основываясь на таких персонализированных пороговых данных, обратная связь в виде электрической имитации тактильных ощущений может быть доставлена к любой части руки по запросу. Причём, в надлежащем диапазоне интенсивности, чтобы не вызывать боли или, наоборот, не оказаться слишком слабой для того, чтобы её можно было почувствовать. Таким образом, виртуальная тактильная информация, включая пространственные и временные последовательности, может быть воспроизведена на всей руке с довольно высокой и ‒ главное ‒ персонализированной точностью.
Для создания программируемых шаблонов пространственно-временной обратной связи, наладонник WeTac надевается на руку и, обеспечивая 32-хпиксельную электротактильную стимуляцию, снимает отклик со всей ладони, а не только с кончиков пальцев пользователя. Среднее расстояние между центрами круглых электродов ‒ примерно 13 мм, и этого достаточно для обеспечения довольно широкого охвата руки так, чтобы вы могли понимать каким её местом вы коснулись чего-либо.
Кроме того, в устройстве предусмотрены несколько встроенных мер безопасности. Одно из них призвано защитить пользователей от поражения электрическим током, а другое поддерживает температуру интерфейса в относительно низком диапазоне ‒ от 27 до 35,5°C. Такие параметры помогут избежать дискомфорта во время непрерывной продолжительной работы.
Проведённые опыты показали успешность интеграции новинки в сценарии виртуальной и дополненной реальности, а также устойчивую синхронизацию с роботизированными руками посредством связи BLE. Миниатюрность, беспроводной формат и стратегия обратной связи, ориентированная на чувствительность, делают тактильный отклик с WeTac намного проще и удобнее. Пользователь становится действительно способен ощущать виртуальные объекты в различных сценариях: ловит он теннисный мяч на тренировке, трогает кактус, чувствует лёгкое касание в социальных контактах или играет в виртуальные игры.
«Мы считаем, что это мощный инструмент для обеспечения виртуального прикосновения, который вдохновляет на разработку метавселенной, человеко-машинного интерфейса (ЧМИ) и других областей», ‒ говорит доктор Ю.
АРМК, по материалам CityU.
{kind=link}