

Дата публикации: 06.05.2022
Облегчённое проектирование
мягких протезов и
вспомогательных устройств.
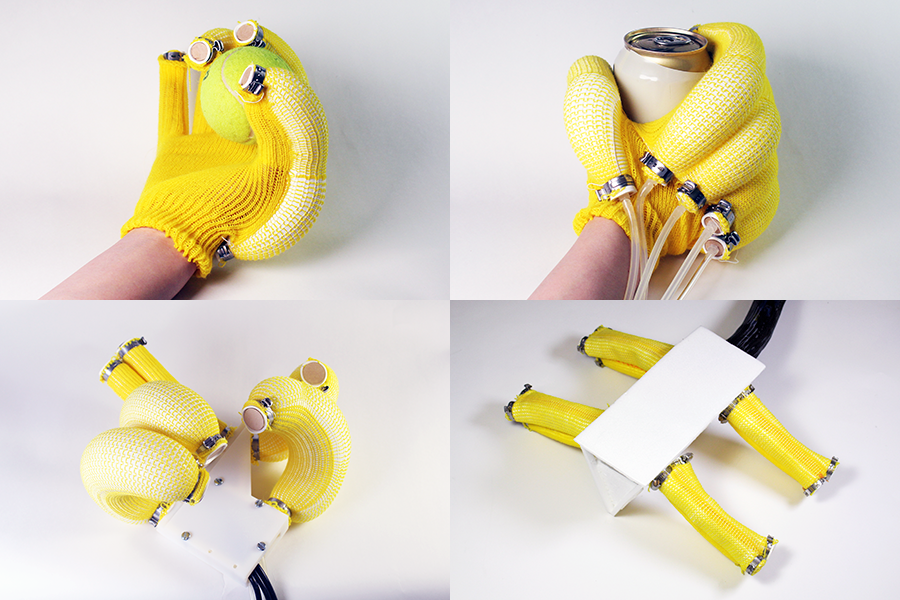
Пневматические приводы машинной вязки: вспомогательная перчатка, мягкая рука и пневматический четвероногий робот. Источник.
Многие из нас помнят своих бабушек, вязавших нам шарфы, свитера, варежки, тёплые уютные носки. Что ж, видимо, пришла пора вкусить круговорот истории, ибо вязание снова в моде! Ну, не то, чтобы в моде, но оно снова может стать актуальным. Просто… пришло время вязать роботов.
Итак, мягкие пневматические приводы не столь популярны и не так часто всплывают в околонаучных новостях, но их определённо не стоит списывать со счетов, когда речь идёт о разработках носимой робототехники. Эти устройства обеспечивают движение наподобие того, как это делают давно знакомые нам пневмоцилиндры – используя энергию сжатого газа (воздуха) в качестве толкателя для поступательного движения поршня, – с той лишь разницей, что в роли цилиндра выступает гибкая оболочка, да и поршня как такового, в общем-то, нет. А благодаря сенсорным возможностям той самой гибкой оболочки они зарекомендовали себя как критически важная основа в различных областях применения. Их мягкость обусловливает деликатность операций, необходимую во многих вспомогательных устройствах, включая реабилитационное оборудование.
Однако у всего есть слабые места, но в случае с пневмоприводами – дело не в самой технологии, а в трудозатратах, необходимых для её осуществления. Создание столь небольших динамических устройств, обладающих преимуществами в виде высокой скорости отклика и соотношения мощностей (собственной и входной – т. е. той, которая нужна для их работы), требует ручного проектирования и конвейера изготовления. А это многократно увеличивает число проб и ошибок, необходимых для фактического тестирования и наглядности результатов. Ведь нужно удостовериться, что устройство будет работать должным образом.
Эта преграда здорово тормозила развитие изысканий в данной сфере, но учёные из Лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института (CSAIL) смогли обойти препятствие путём разработки масштабируемого конвейера для вычислительного проектирования и цифрового изготовления мягких пневматических приводов. Своё детище исследователи назвали «PneuAct» (пневмодвижение или пневмодвигатель).
Устройство отправляет команды на что-то вроде прядильного станка, занятого, однако, не пряжей, а вязанием. Не то, чтобы этот станок можно было назвать механическим эквивалентом бабушки, но определённое сходство с процессом вязания спицами есть. Машина работает автономно, а всё, что нужно сделать дизайнеру – задать шаблоны стежков и датчиков в программном обеспечении. Другими словами, внешне это похоже на работу принтера, где текст-программа руководит движениями печатающей головки. Разница лишь в том, что здесь программирование определяет не столько внешний облик будущих приводов, сколько нюансы их движений. Здесь же, в программе, все особенности можно смоделировать и виртуально протестировать перед началом изготовления пневмомышц. Созданная машинным вязанием текстильная деталь может быть закреплена на недорогой стандартной резиновой силиконовой трубке, что, по сути, и завершит конструкцию привода.
Всего команда подготовила несколько прототипов изделий, использующих описанный источник движения: вспомогательную перчатку, мягкую руку, интерактивного робота и четвероногое животное с пневматической ходьбой. Все их движители были обёрнуты мягкой жёлтой тканью, из-за чего несколько напоминали банановые пальцы.
Но есть ещё кое-что интересное внутри этих «пальцев». В процессе производства в волокна получившегося «носка» учёные включают особую токопроводящую нить, позволяющую приводам понимать, что их что-то коснулось. Эта схема восприятия несколько перекликается с нашей предыдущей статьёй, однако в освещаемой теме она имеет несколько опосредованное значение, поскольку является пусковым механизмом для работы мягкого робота. Однако – не только для этого.
Несмотря на довольно скудные изменения в аппаратной разработке пневматических мягких приводов в минувшие годы – последняя интересная новость появилась около 4 лет назад, когда для имитации захвата человеческим пальцем был спроектирован специальный мягкий привод, – инструменты проектирования не улучшились так, как можно было бы ожидать. В прежних исследованиях и разработках обычно применяли полимеры и литье, но на этот раз учёные решили использовать комбинацию стежков с проводящей нитью, чья эластичность и сенсорная реакция позволяют уверенно и целенаправленно программировать изгиб устройств при их надувании, а также – что тоже немаловажно – учитывать обратную связь от окружающего мира.
Так, с помощью мягких пневмоприводов и токопроводящих волокон, содержащихся в их конструкции, команда создала робота, который реагирует на прикосновения. Вот, например, пациент с травмой руки может носить перчатку, которая способна облегчить нагрузку на пальцевые мышцы, беря на себя долю необходимого напряжения при выполнении бытовых задач и движений. В таком случае сигналом к началу работы может стать касание предмета, который необходимо взять в руки.
Эта схема вырисовывает потенциал применения таких мягких и лёгких помощников для людей с травмами и ограниченной подвижностью не только пальцев. Сюда также можно включить идею создания бандажей или своего рода экзоскелетов, когда носимые роботизированные управляемые устройства дополняют движения человека и восстанавливают активность суставов и мышц, способствуя терапевтическим мероприятиям и, в конечном счёте, выздоровлению или облегчению боли, а также повышению самостоятельности их пользователя. С этой целью исследователями был сконструирован прототип рукава, призванного помочь согнуть локоть или колено.
«Цифровое машинное вязание, которое является очень распространённым производственным методом в современной текстильной промышленности, позволяет «печатать» дизайн за один раз, что делает его гораздо более масштабируемым, – говорит об исследовании Июэ Луо, аспирант MIT CSAIL и ведущий автор. – Мягкие пневматические приводы по своей природе совместимы и гибки, а в сочетании с интеллектуальными материалами они стали необходимой силой во многих роботах и вспомогательных технологиях, и мы надеемся, что быстрое изготовление с помощью нашего инструмента проектирования может повысить простоту и повсеместность».
Разбираемся в датчиках
Один из включённых в рабочий процесс типов датчиков был назван авторами «резистивным сенсором давления». По сути, его назначением стало распознавание и считывание сопротивления посылаемому приводом давлению. То есть он призван определить при захвате предмета, какая сила приложена к объекту, на основе чего, в свою очередь, делается вывод об успехе захвата. Другой тип устройств приобрёл «ёмкостное значение», позволяющее сенсору различать некоторую информацию о материалах, с которыми соприкасается исполнительный механизм.
При всей сложности приводы получились довольно прочными – в ходе испытаний не вышел из строя ни один экземпляр. Однако налицо и ограничения системы. Правда, они вызваны тем, что самые распространённые двигающие механизмы обладают исключительно трубчатой формой. С одной стороны, они дёшевы и их очень легко купить в готовом виде, но с другой это означает, что подход и выстроенный на нём метод актуален только для этого форм-фактора. Поэтому следующим логическим шагом будет изучение приводов различной формы, чтобы не ограничивать технологию одной структурой.
В качестве ещё одного потенциала полезности исследователи изучают оптимизацию инструмента путём модификации производства под управляемый задачами дизайн. Это означает, что операторы программы смогут указать целевые позы будущих приводов и оптимальные схемы стежков, которые затем будут синтезированы уже автоматически.
«Наш программный инструмент быстр, прост в использовании и предоставляет тщательный предварительный просмотр проектов пользователей, позволяя им быстро виртуально повторять итерации, а изготовить их нужно всего один раз. Но этот процесс по-прежнему требует от людей проб и ошибок. Может ли компьютер рассуждать о том, как текстиль должен быть физически запрограммирован в исполнительных механизмах, чтобы обеспечить богатое поведение, управляемое сенсорами? Это следующий рубеж», – говорит Эндрю Спилберг, постдок в области материаловедения и машиностроения Гарвардского университета, соавтор исследования.
АРМК, по материалам MIT News.
{kind=link}